|
Hi, I am Hiroyasu Akada from Japan I am a Ph.D. candidate in the Visual Computing and Artificial Intelligence Department at Max Planck Institute for Informatics with my supervisor Dr. Vladislav Golyanik and Prof. Christian Theobalt.
Previously, I obtained my MS and BS at Keio University, with Prof. Masaki Takahashi.
During my MS, I had a great opportunity to work with Prof. Peter
Wonka at KAUST.
E-mail: hakada@mpi-inf.mpg.de |
|
|
[June 2025] One paper got accepted to ICCV 2025. Stay tuned for more details!
|
|
My research focus lies at the intersection of Computer Vision and Deep Learning. In particular, I am interested in the following topics:
|
|
|

|
Bring Your Rear Cameras for Egocentric 3D Human Pose EstimationHiroyasu Akada, Jian Wang, Vladislav Golyanik, and Christian TheobaltInternational Conference on Computer Vision (ICCV), 2025 [Project page] [Paper] [Code (coming soon)] Egocentric 3D full-body tracking has been studied using cameras installed in front of a head-mounted device (HMD). While frontal placement is the optimal and the only option for some tasks, such as hand tracking, it remains unclear if the same holds for full-body tracking. Notably, even the state-of-the-art methods often fail to estimate accurate 3D poses in many scenarios, such as when HMD users tilt their heads upward---a common motion in human activities. Hence, this paper investigates the usefulness of rear cameras in the HMD design for full-body tracking. We show that simply adding rear views to the frontal inputs is not optimal for existing methods and propose a new method that refines 2D joint heatmap estimation, thereby significantly improving 3D pose tracking (>10% on MPJPE). Furthermore, we introduce two new large-scale datasets, Ego4View-Syn and Ego4View-RW, for a rear-view evaluation. |
|
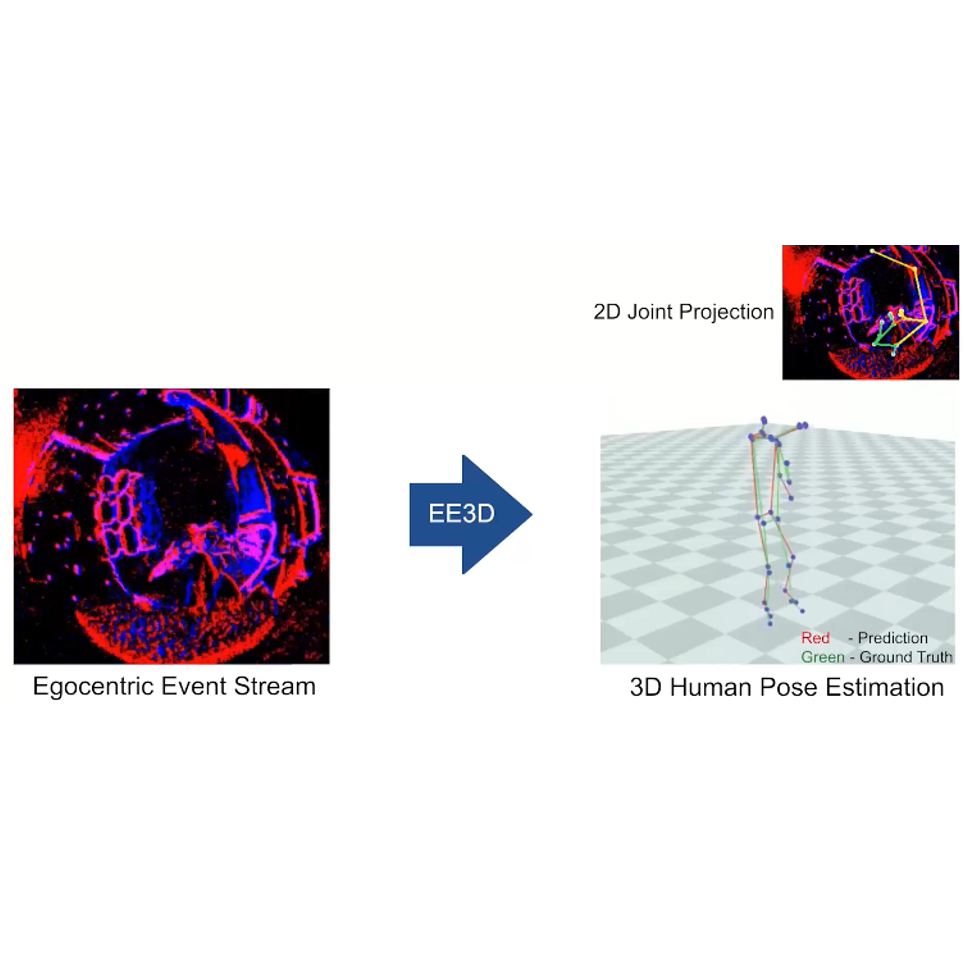
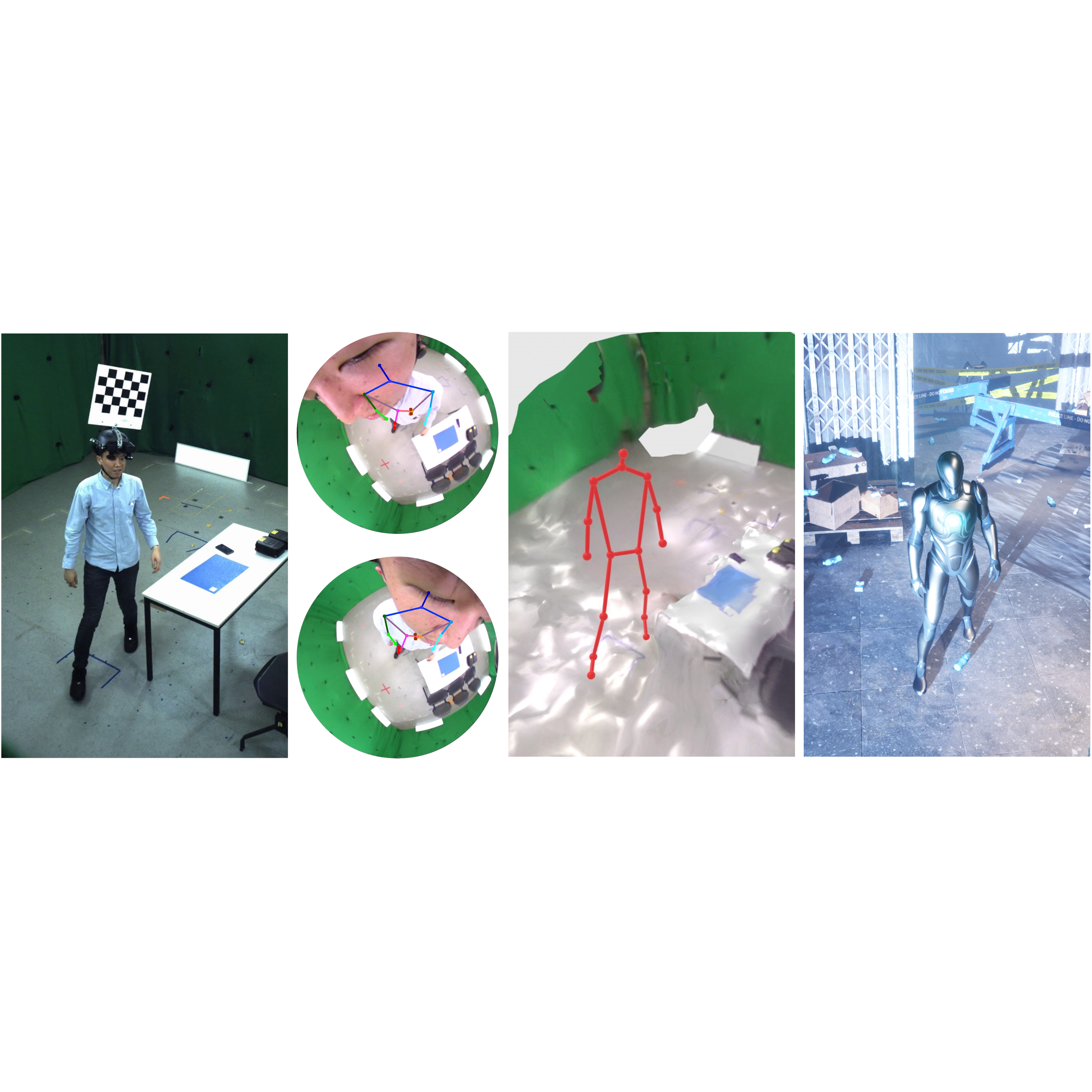
EventEgo3D++: 3D Human Motion Capture from a Head Mounted Event CameraChristen Millerdurai, Hiroyasu Akada, Jian Wang, Diogo Luvizon, Christian Theobalt, Vladislav GolyanikInternational Journal of Computer Vision (IJCV), 2025 [Project page] [Paper] [Code (coming soon)] This paper is an extension of our previous work "EventEgo3D (CVPR 2024)" (See below). We tackle a new problem, i.e. 3D human motion capture from an egocentric monocular event camera with a fisheye lens. "EventEgo3D (CVPR 2024)" proposed the EE3D framework that is specifically tailored for learning with event streams in the LNES representation, enabling high 3D reconstruction accuracy. We upgrade this framework to a new EE3D++ framework for further performance improvement. We also introduce a new dataset, EE3D-W, in addition to EE3D-S and EE3D-R from "EventEgo3D (CVPR 2024)". |
|
3D Human Pose Perception from Egocentric Stereo VideosHiroyasu Akada, Jian Wang, Vladislav Golyanik, and Christian TheobaltComputer Vision and Pattern Recognition (CVPR), 2024, Highlight (top 3.5%) [Project page] [Benchmark Challenge] [Paper] [Code] In this work, we propose a new transformer-based framework to improve egocentric stereo 3D human pose estimation, which leverages the scene information and temporal context of egocentric stereo videos. Furthermore, we introduce two new benchmark datasets, i.e., UnrealEgo2 and UnrealEgo-RW (RealWorld). Our extensive experiments show that the proposed approach significantly outperforms previous methods. |
|
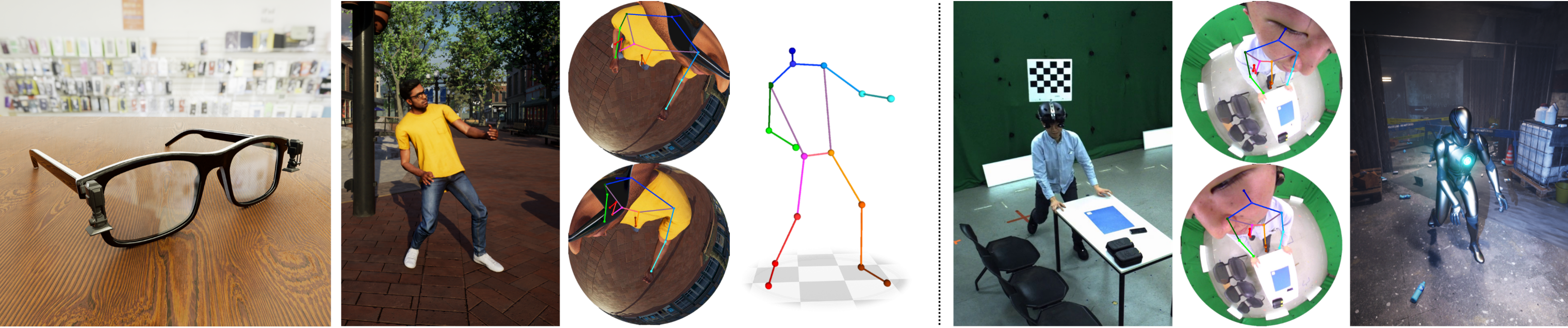
EventEgo3D: 3D Human Motion Capture from Egocentric Event StreamsChristen Millerdurai, Hiroyasu Akada, Jian Wang, Diogo Luvizon, Christian Theobalt, Vladislav GolyanikComputer Vision and Pattern Recognition (CVPR), 2024 [Project page] [Paper] [Code] We tackle a new problem, i.e. 3D human motion capture from an egocentric monocular event camera with a fisheye lens. Event streams have high temporal resolution and could provide reliable cues for 3D human motion capture under high-speed human motions and rapidly changing illumination. We leverage these characteristics and propose the first approach for event-based 3D human pose estimation, EventEgo3D (EE3D). The proposed EE3D framework is specifically tailored for learning with event streams in the LNES representation, enabling high 3D reconstruction accuracy. We also provide two new datasets, EE3D-S and EE3D-R. |
|
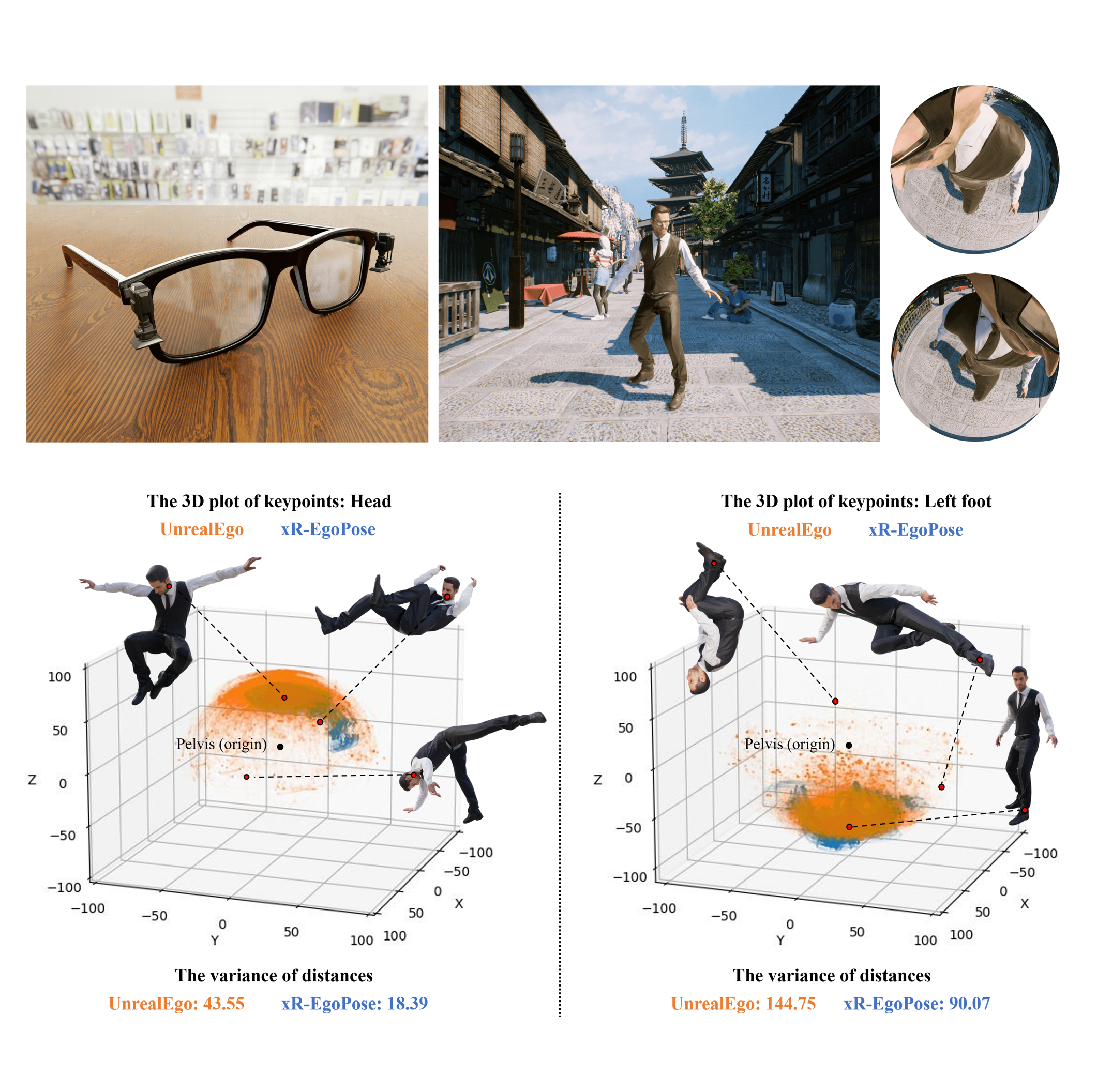
UnrealEgo: A New Dataset for Robust Egocentric 3D Human Motion CaptureHiroyasu Akada, Jian Wang, Soshi Shimada, Masaki Takahashi, Christian Theobalt, and Vladislav GolyanikEuropean Conference on Computer Vision (ECCV), 2022 [Project page] [Paper] [Code] We present UnrealEgo, i.e. a new large-scale naturalistic dataset for egocentric 3D human pose estimation. UnrealEgo is based on an advanced concept of eyeglasses equipped with two fisheye cameras that can be used in unconstrained environments. UnrealEgo is the first dataset to provide in-the-wild stereo images with the largest variety of motions among existing egocentric datasets. We also propose a new benchmark method that achieves the state-of-the-art results on UnrealEgo. |

|
Self-Supervised Learning of Domain Invariant Features for Depth EstimationHiroyasu Akada, Shariq Farooq Bhat, Ibraheem Alhashim, Peter WonkaIEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2022 [Paper] [Code] We tackle the problem of unsupervised synthetic-to-real domain adaptation for single image depth estimation. An essential building block of single image depth estimation is an encoder-decoder task network that takes RGB images as input and produces depth maps as output. In this paper, we propose a novel training strategy to force the task network to learn domain invariant representations in a self-supervised manner. |
|
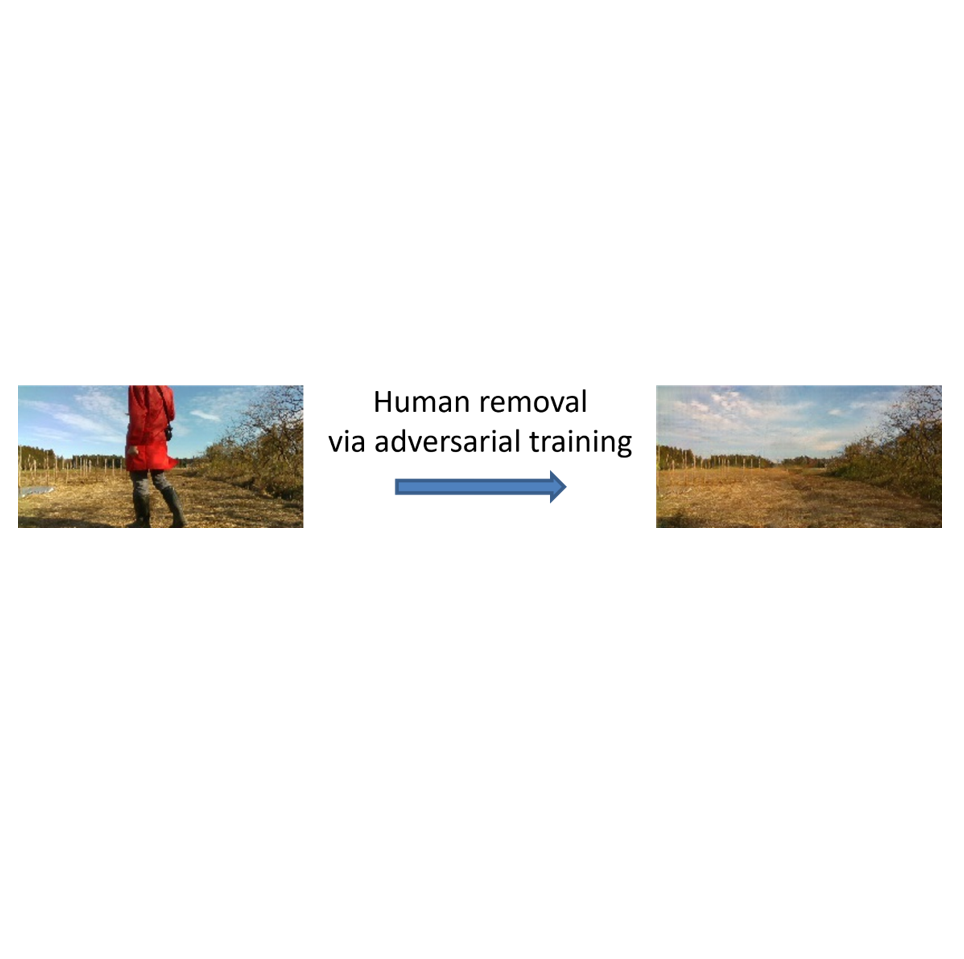
Dynamic Object Removal from Unpaired Images for Agricultural Autonomous RobotsHiroyasu Akada and Masaki TakahashiInternational Conference on Intelligent Autonomous Systems (IAS), 2021 [Paper] We developed a GAN-based stem that remove dynamic objects in images. The system can be trained without using paired images with/without the dynamic objects. |
|
[Sep 2022 - Present] Ph.D. student, Max Planck
Institute for Informatics (Saarbrucken, Germany) |
|
|
|
Lab Visits:
Conference Participation:
Reviewer Experience:
|
|
© Hiroyasu Akada 2022 / Design: jonbarron Icons: Freepik - Flaticon |